 LiU Homepage
LiU Homepage
Tensor-field based localization project
- Funding agency: Swedish Research Council (VR) & Security Link
- Project leader: Isaac Skog
- Project partners: FOI, Swedish Defense Research Agency
- Duration: 2022 - 2027
News and results
- I together with Gustaf Hendeby (LiU) and Manon Kok (TU Delft), will give a tutorial on Indoor Localization using Magnetic Fields at Int. Conf. on Indoor Positioning and Indoor Navigation (IPIN), Sept. 2023.
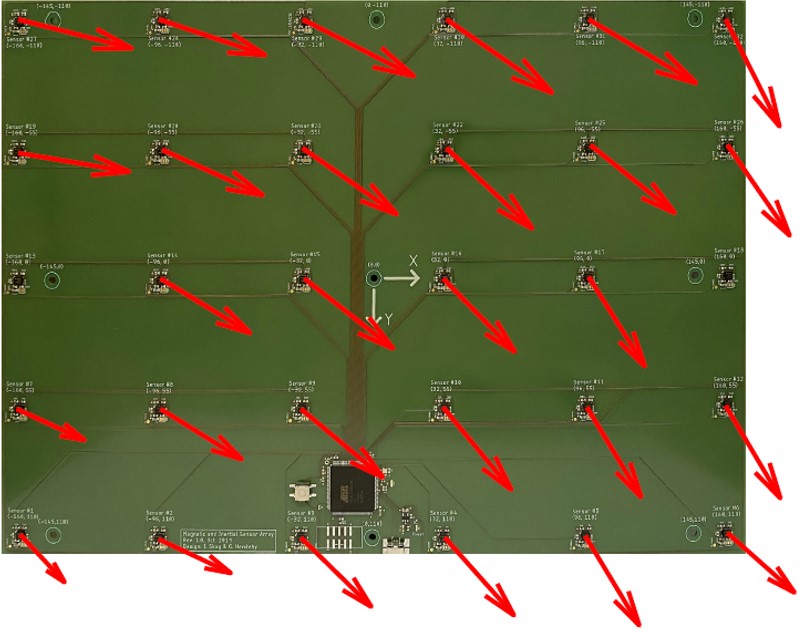
- A new high-sensitive magnetic-field sensor array has been constructed. Public data sets will be published during the autumn.
- MSc. Chuan Huang started as a Ph.D. student in the project.
Project description
Vector fields, such as the earth's magnetic field and gravity field, are highly informative sources for localization. These exemplified vector fields are omnipresent, stable over-time, and variations in the fields, if measured accurately, provide a fingerprint highly correlated to the measurement location. Hence, they constitute a viable and robust source for localization in GPS-denied environments.
- Sensor-fusion and model-learning methods for tensor-field based odometry aided inertial navigation. This will reduce the inertial navigation error growth rate from cubic to linear in time, enabling significantly longer stand-alone operation times before the location error gets too large.
- Sensor-fusion and map-representation methods tailored for joint tensor-field based odometry and SLAM. Compared to existing vector-field SLAM solutions, this will drastically extend the length of the allowable exploration phases where new areas are mapped, as well as increase the accuracy and reliability through more informative field measurement.
Tutorials
The tutorial "Indoor Localization using Magnetic Fields" has been given at the IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN) 2023 by Gustaf Hendeby, Manon Kok, and Isaac Skog. The slides from the tutorial can be downloaded here:- Part 1: Introduction to Magnetic-Field Based Localization
- Part 2: Magnetic-Field Based Odometry
- Part 3: Magnetic field SLAM
Publications
- C Huang, G. Hendeby, and I. Skog A Tightly-Integrated Magnetic-Field aided Inertial Navigation System, IEEE Int. Conf. Information Fusion (FUSION), Jul. 2022.
- I. Skog, G. Hendeby, and F. Trulsson, Magnetic-field Based Odometry An Optical Flow Inspired Approach, IEEE Int. Conf. Indoor Positioning Indoor Navigation, Nov. 2021.
- I. Skog, G. Hendeby, and F. Gustafsson, Magnetic odometry-a model-based approach using a sensor array, IEEE Int. Conf. n Information Fusion (FUSION), 2018.

Associate Professor in Automatic Control,
Docent in Signal Processing
(Swedish: Universitetslektor i reglerteknik)
- Phone:
- +46 708186805
- E-mail:
- isaac.skog_at_liu.se
- Address:
- Dept. of Electrical Engineering
- Linköping University
- SE-581 83 Linköping
- Sweden
- Visiting Address:
- Campus Valla
- Building B
- Room 2A:526
Informationsansvarig: Isaac Skog
Senast uppdaterad: 2023-10-03
