 LiU Homepage
LiU Homepage
Research areas
Currently, most of my research is related to the following topics.Underwater monitoring and surveillance
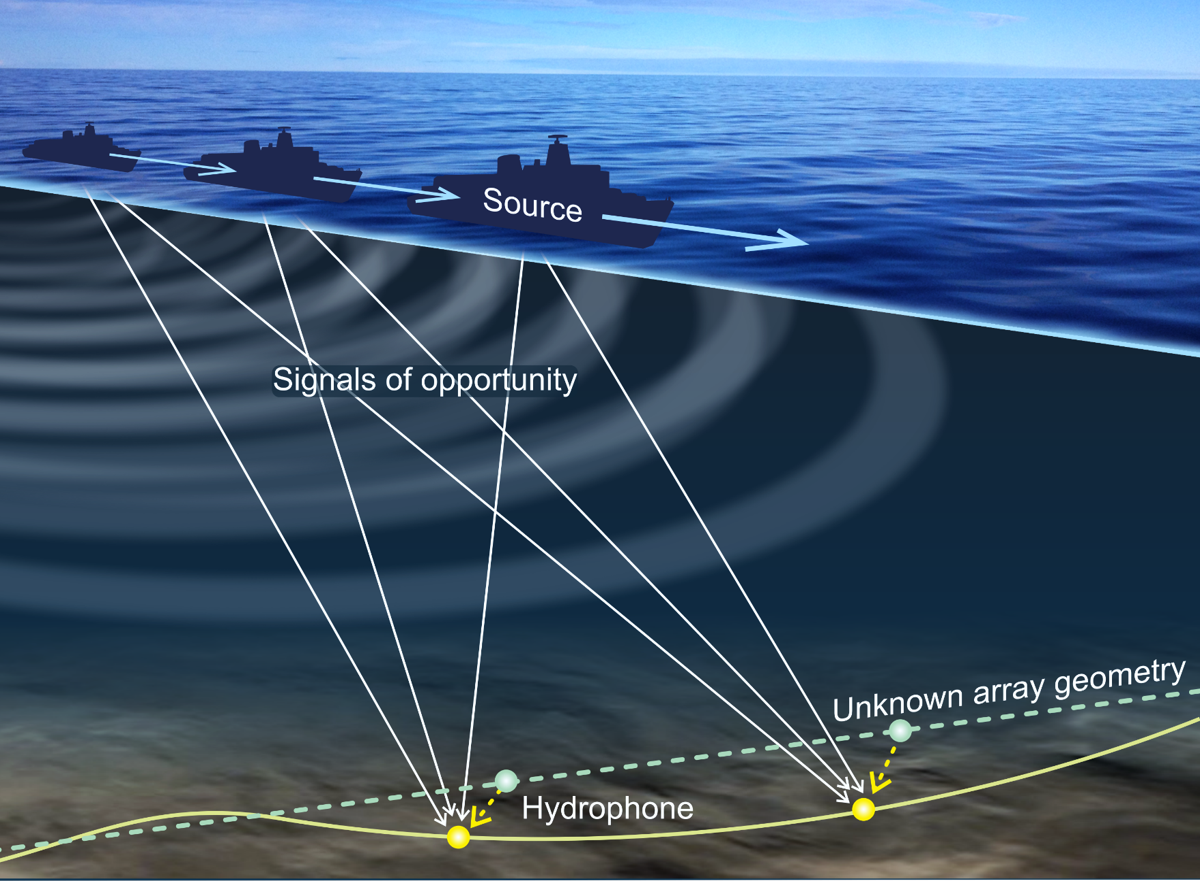
During the last decades a range of new signal processing theories and methods for target detection and tracking, such as random finite set filters, adaptive waveform design, and track-before-detect filters, have been developed. Along the same line of research, methods for sensor management and distributed sensor fusion in sensor networks subjected to energy, computational, and communication constraints, have been developed. These methods have successfully been applied in various terrestrial radar systems and sensor networks. However, due to the complex acoustic environment the application of these theories and methods in sub-surface monitoring and surveillance systems remains a challenge. This is especially the case for systems that are to operate in littoral waters, such as the Swedish coast. The shallow depths, surface heating and cooling, salinity changes, dense civil traffic, etc., result in an ever-changing acoustic environment; an environment to which the theories and methods must be adapted and tuned. Generally, the complex acoustic environment also limits the communication capabilities within underwater sensor networks to a point beyond that imposed on terrestrial sensor networks. This implies that the employed distributed target detection and tracking methods have to function with a minimum of information exchange, and new communication strategies that make dual use of the communication signals both for sensing and information exchange, are necessary.
Within the Complex
Acoustic Surveillance and Tracking (COAST) project , I in cooperation with the Dept. of
Naval Systems & Underwater Technology, Swedish Defence Research Agency (FOI), and Saab Dynamics,
research and develop methods to adapt current state-of-the-art target detection and tracking methods
to the complex acoustic environment encountered by sub-surface systems.
Inertial and magnetic-field sensor arrays
Today, thanks to development of the micro-electromechanical-systems (MEMS) technology, miniaturized accelerometers, gyroscopes, and magnetometers can be produced at unprecedented volumes and at low price. Unfortunately, the performance of these ultra-low-cost sensors is too poor to enable accuracte and reliable localization in many applications. However, by capitalizing on the small size, low price, and low power consumption of the sensors it is now feasible to construct arrays with hundreds of sensing elements and fuse their measurement to create "super sensors" with unprecedented performance-to-price ratios;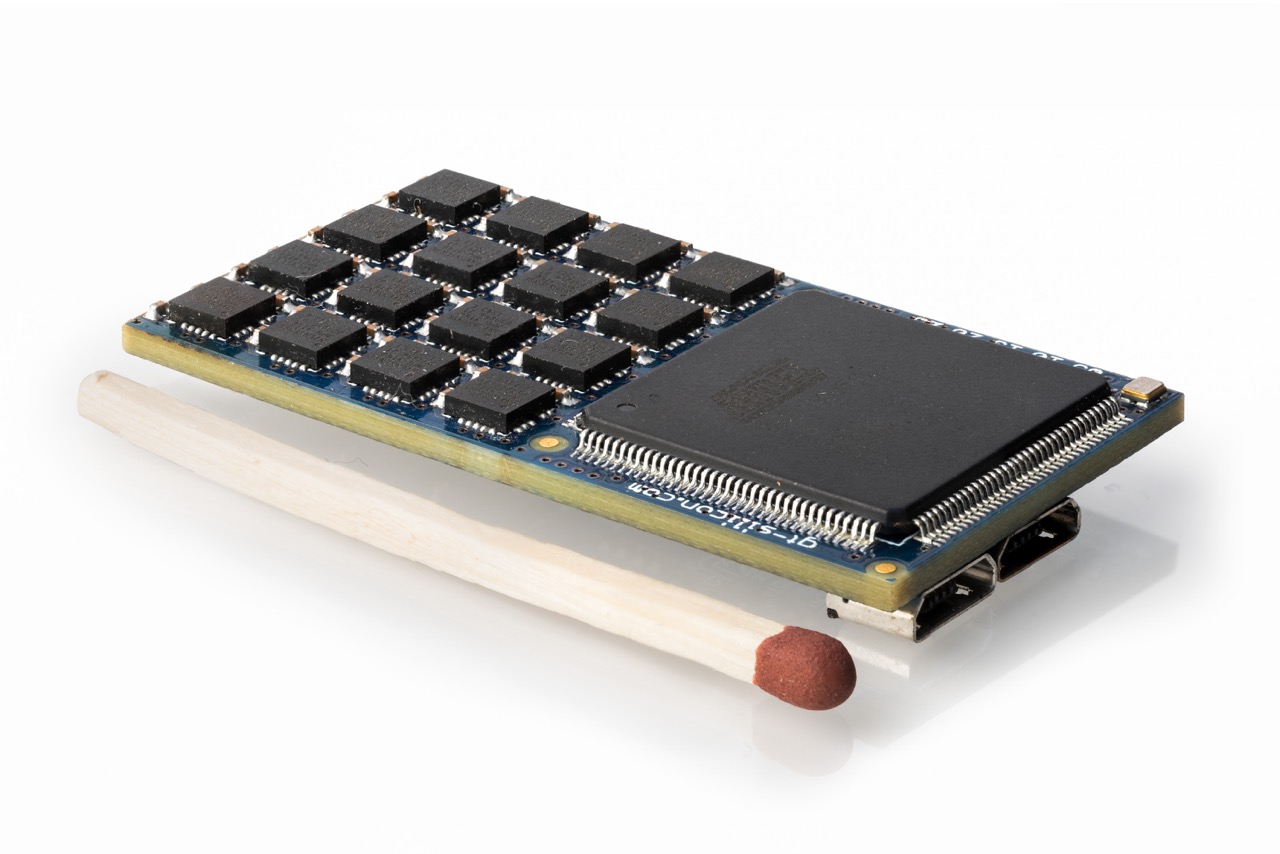
- Inertial and Magnetic-Field Sensor Arrays - Capabilities and Challenges
- Inertial Sensor Array Processing with Motion Models
- On-the-fly geometric calibration of inertial sensor arrays
- Inertial Sensor Arrays, Maximum Likelihood, and Cramer-Rao Bound
- Inertial sensor arrays - A literature review
- Aligning the Forces - Eliminating the Misalignments in IMU Arrays
Insurance telematics
Insurance telematics is a disruptive technology that is expected to reform the vehicle insurance industry. Based on sensor data, the traditional measures for calculating the insurance premium are complemented to determine a fee that more accurately predicts the risk profile of the policyholder. From an signal processing point of view, there are several insurance telematics challenges that have to be tackled. It is about consistently, from low quality data, extracting relevant figures of merit (FoMs) like number of harsh braking, speeding, heavy cornering, trip smoothness, etc, and then to transform these FoMs into a valid measure, or score, that determines the risk profile of the insurance customer.During the last 4 years I, together with Prof. P. Handel (KTH) and J. Wahlstrom (KTH), have conducted research on how the smartphone can be used as a measurement probe in insurance telematics applications. The main focus has been on developing signal processing methods that enables (reliable) calculation of driver behavior FoM from the often poor data provided by the smartphone sensors. Some of our most recent publications on the topic are:

Associate Professor in Automatic Control,
Docent in Signal Processing
(Swedish: Universitetslektor i reglerteknik)
- Phone:
- +46 708186805
- E-mail:
- isaac.skog_at_liu.se
- Address:
- Dept. of Electrical Engineering
- Linköping University
- SE-581 83 Linköping
- Sweden
- Visiting Address:
- Campus Valla
- Building B
- Room 2A:526
Informationsansvarig: Isaac Skog
Senast uppdaterad: 2019-10-24
