 LiU Homepage
LiU Homepage
André Carvalho Bittencourt: Research
My current research is mainly focused on diagnostics of friction and wear in industrial robots. The main interest is to develop methods to determine the mechanical condition of the robot (e.g. to determine whether the system is healthy or close to a failure). Due to restrictions in the application, it is desireable to develop methods that can be used during normal execution of the system and with no additional sensors. This is a challenging problem since the available data relates only indirectly to the system condition and is also affected by disturbances. The video below illustrates the relevance of this work in applications.
Video courtesy of ABB.
The main idea pursued is to monitor friction to infer about wear in the joints. Both model-based and data-driven methods have been considered.
Wear effects to friction
Experimental data show that increased wear levels in a robot joint cause changes on the friction behavior in the joint. This can be seen in the figure below which shows changes in the friction curve characteristics for a joint under accelerated wear tests.
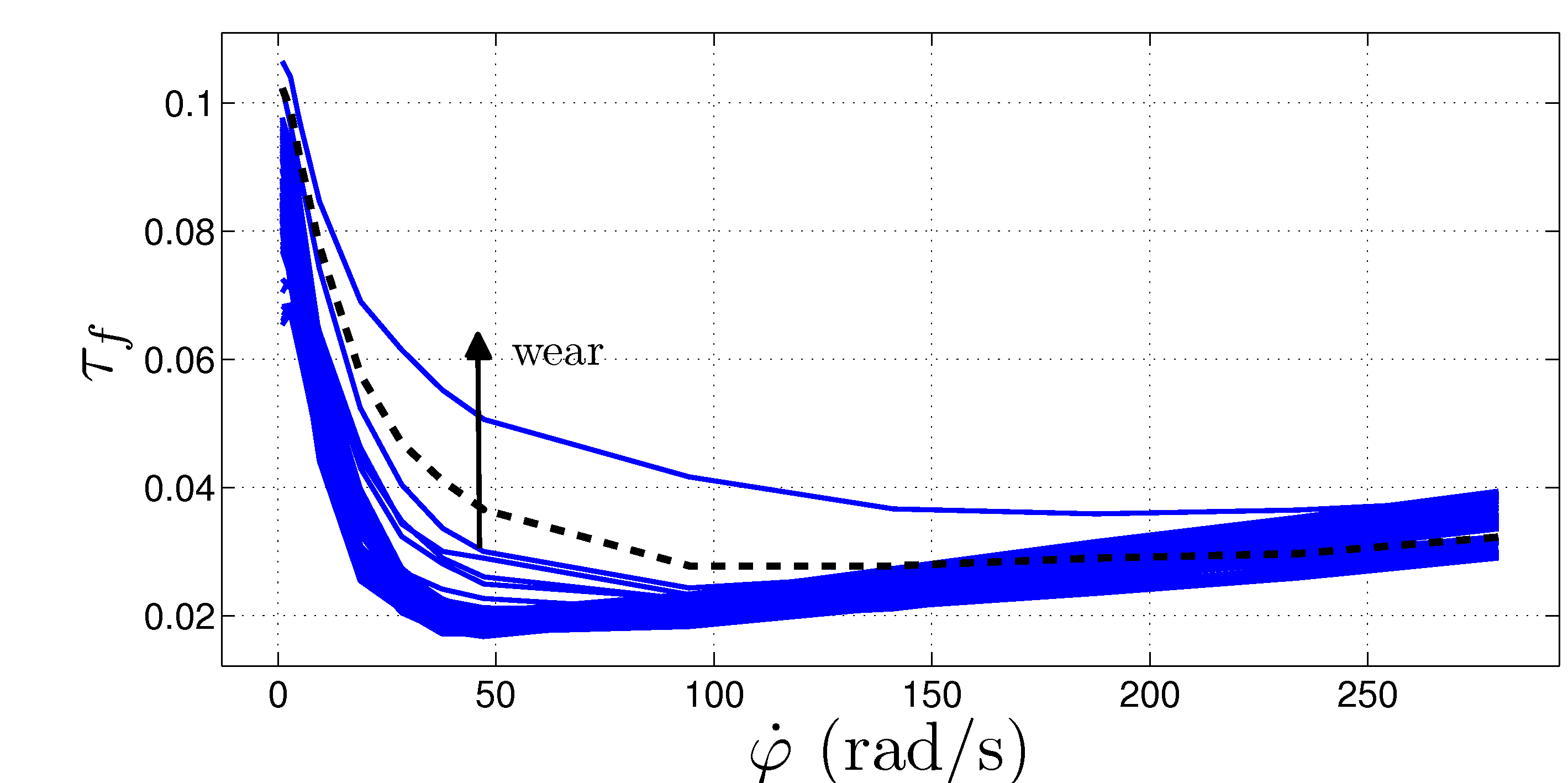
Wear effects to friction curve from accelerated wear tests.
Since the friction torques must be overcome by the motor torques during a robot operation, it is possible to extract information about friction from available signals.
Temperature and Load effects to friction
Wear is however not the only factor to affect friction. Temperature and load are also important. The figure below shows friction curves for a robot joint under diverse temperature and load conditions.
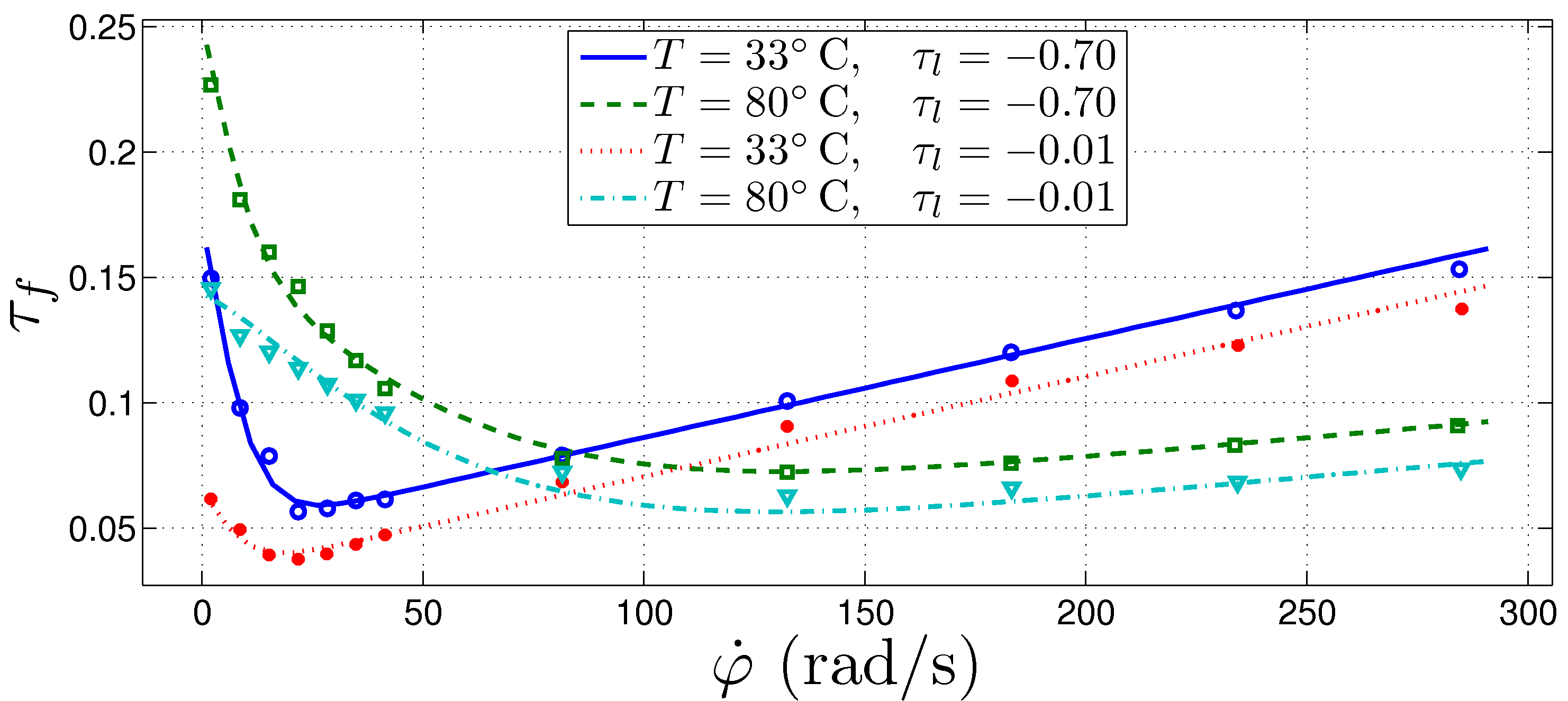
Effects of temperature and load to friction. Markers are experimental data and the lines are predictions from a friction model.
In standard industrial applications, the effects of temperature are particularly difficult since temperature measurements are not available, while load can be estimated from a robot model.
Model-based wear estimation
The effects of wear, temperature and load to friction have been modeled based on experimental data. The resulting friciton model was used to define wear estimators. The effects of the unmeasured temperature variations were also considered to improve robustness of the estimates. The figure below illustrates the wear estimate for a robot joint under accelerated wear tests and temperature uncertainties.
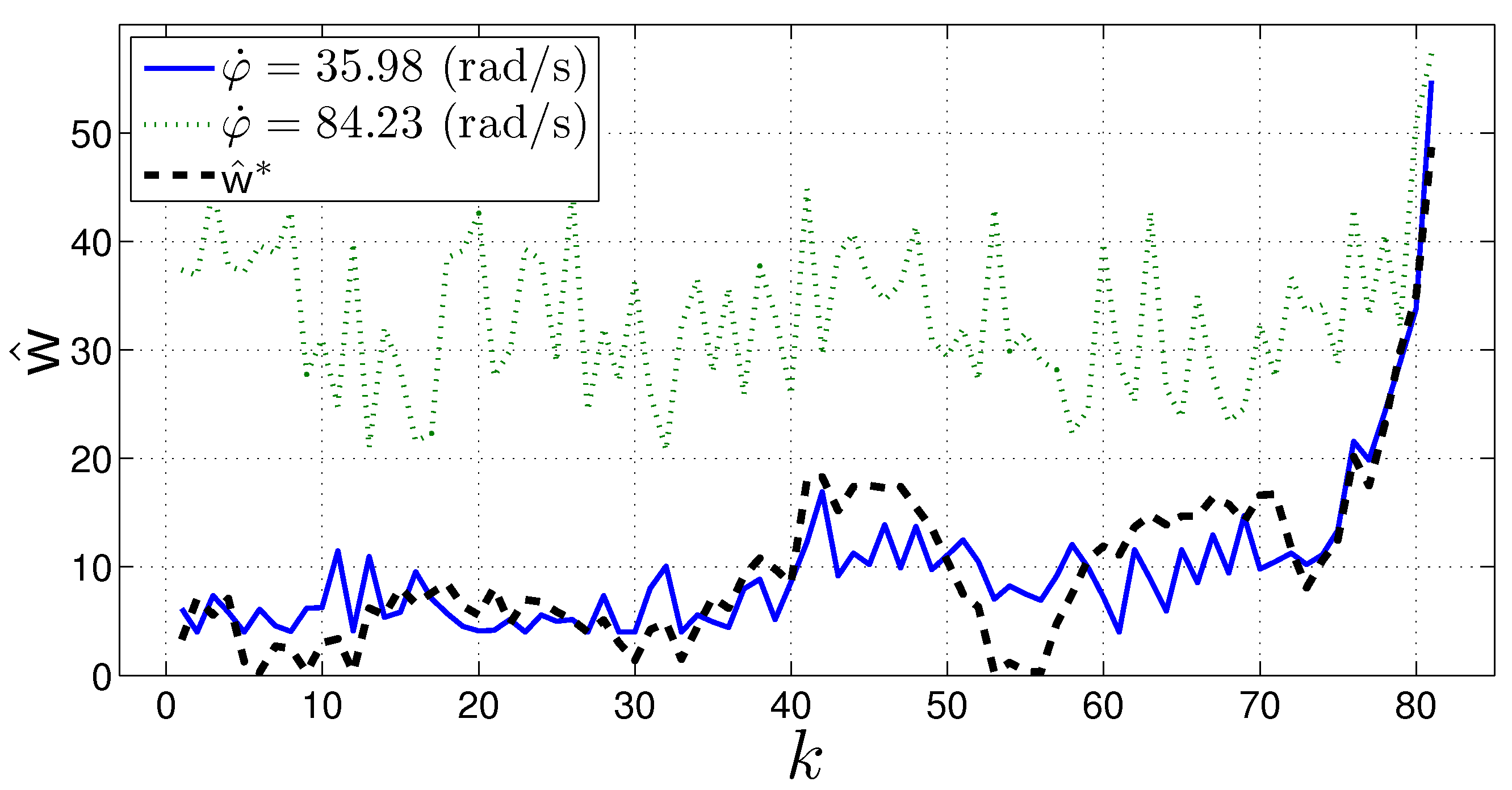
Model-based wear estimation from friction data collected under different speeds. The dashed line relates to a best possible estimate.
The estimate is performed based on friction data collected from an experiment. These type of data is collected for a single speed value and from the figure it is possible to note that the estimate accuracy is dependent on the choice of speed.
Data-driven monitoring of repetitive systems
A difficulty with model-based approaches for diagnosis is that a model must be available. Accurate friction models require extensive off-line experiments for identification of the parameters. An alternative approach was proposed that considers the repetitive behavior of an industrial robot, which is found in many applications.
The data-driven method suggested compares the distribution of data collected from a robot executing the same trajectory. The distribution of collected data is estimated using kernel density estimators and compared through the Kullback-Leibler distance between distributions. With availability of nominal data, the result of these comparisons can be used to infer about the robot joint condition. This is illustrated in the figure below.
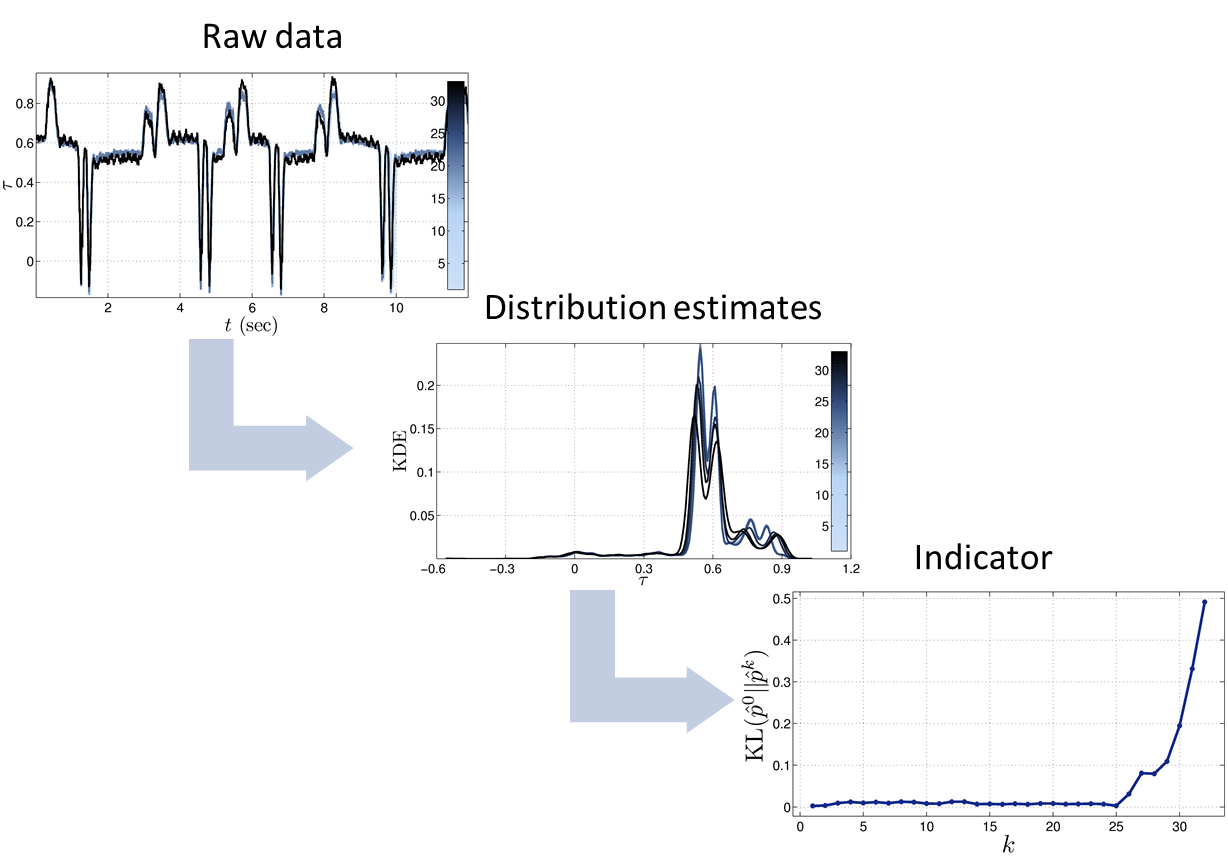
Monitoring of repetitive systems. Raw torque data is collected from a robot executing the same trajectory, their distribution is estimated using kernel density estimators, which are compared against nominal using the Kullback-Liebler distance.
The resulting indicator quantity can be easily used to detect the wear changes.

PhD candidate in Automatic Control
(Swedish: Doktorand i reglerteknik)
- Phone:
- +46 13 282636
- Mobile (private):
- +46 765 550 832
- E-mail:
- andrecb_at_isy.liu.se
- Address:
- Dept. of Electrical Engineering
- Linköping University
- SE-581 83 Linköping
- Sweden
- Visiting Address:
- Campus Valla
- Building B
- Room 2A:532 (in the A corridor on the ground floor between entrance 25 and 27)
Informationsansvarig: André Carvalho Bittencourt
Senast uppdaterad: 2013-04-02
