 LiU startsida
LiU startsida
Niklas Wahlström
Since April 2016, I work at Uppsala University. This homepage will therefore no longer be maintained. See my homepage at Uppsala University.Background
On December 4, 2015 I successfully defended my PhD thesis entitled Modeling of Magnetic Fields and Extended Objects for Localization Applications at the Division of Automatic Control at the Department of Electrical Engineering, Linköping University.
The PhD thesis is divided into three different application areas, all of which as associated with localization. These areas are magnetic localization, extended target tracking, and autonomous learning from raw pixel information. Below is an overview of these research topics as well as a few other topics that I have been working with during my PhD.
Research
My research interests lie in sensor fusion, statistical signal processing machine learning together with its applications. My main path of research deals with using magnetometers for tracking and localization, but I have also conducted research in other areas as well such as localization of migrating birds, extended target tracking and high-dimensional system identification using machine learning techniques.
Magnetic localization
Localization is essential in a variety of applications such as navigation systems, aerospace and surface surveillance, robotics and animal migration studies to mention a few. There are many standard techniques available, where the most common ones are based on information from satellite or terrestrial radio beacons, radar networks or vision systems. In this work, an alternative technique is investigated.
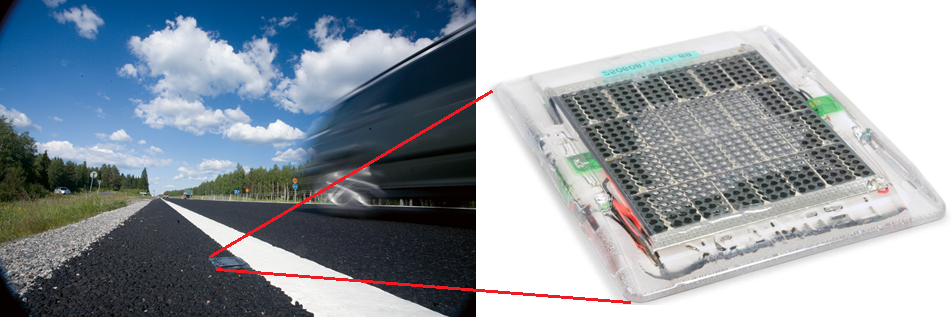
The localization technique is based on one or more magnetometers measuring the induced magnetic field from a magnetic object. These measurements depend on the position and the magnetic signature of the object and can be described with models derived from the electromagnetic theory. One application that has been studied is traffic surveillance, which has a high need for robust localization systems. By deploying one or more magnetometers in the vicinity of the traffic lane, vehicles can be detected and classified. These systems can be used for safety purposes, such as detecting wrong-way drivers on highways, as well as for statistical purposes by monitoring the traffic flow.
Technique can also be used to determine the position and the orientation of small magnets. By deploying four magnetometers on a surface, a small magnet can be localized within a few millimeters of accuracy. By mounting a magnet in a scalpel, pathologists can create a digital record of their work. A magnet can also be mounted in a puck for a table hockey game to digitally visualize its position and automatically count the number of goals scored. The magnet can also be mounted in a water color brush to create a digital painting station for children without the mess of water colors. We have, with help of external partners, developed demonstrations for all three applications with good results. The painting station has also been exhibited at the science center in Norrk?ing Visualization Center.
System identification and control of high-dimensional time series
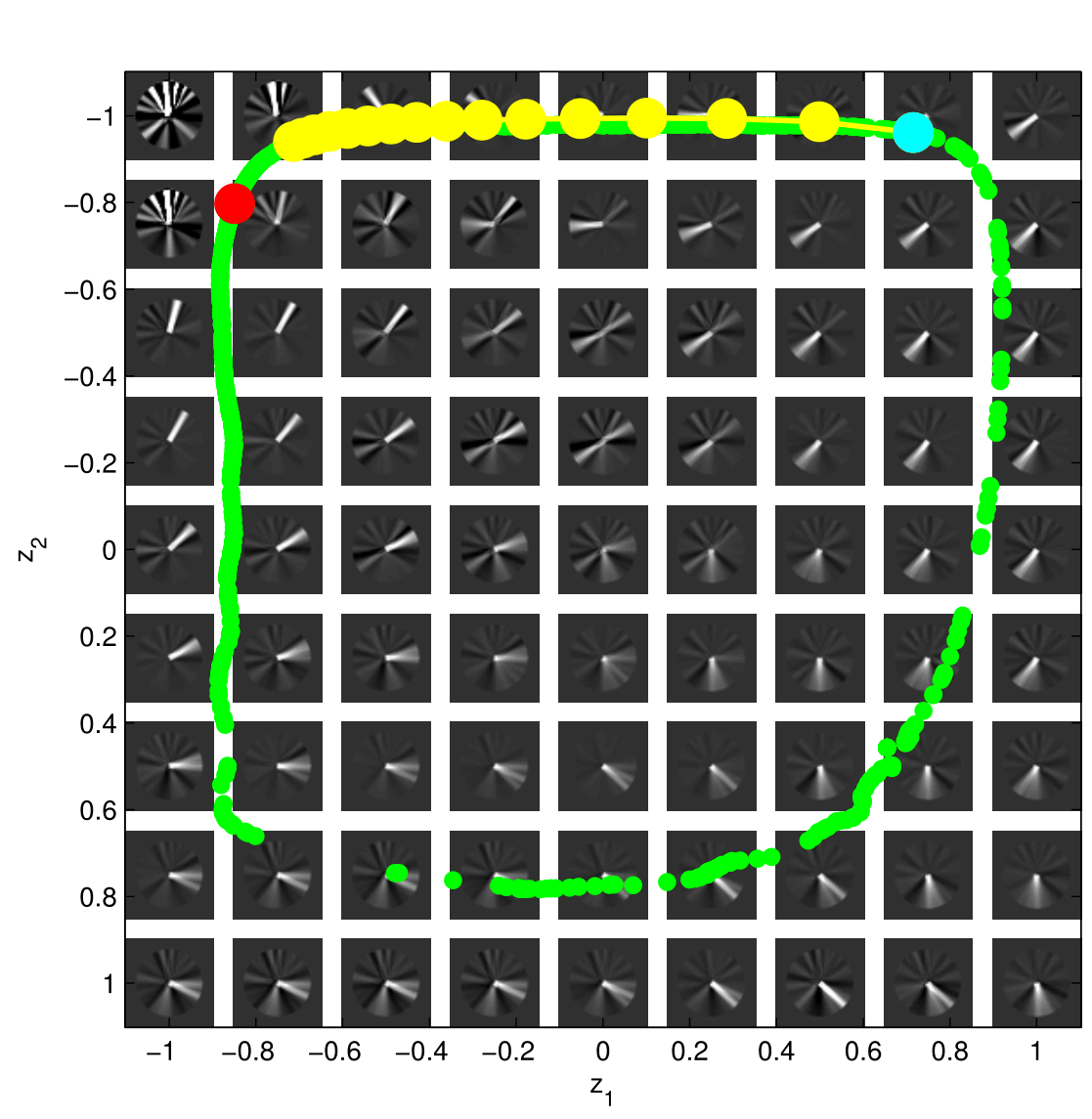
Data-efficient learning in continuous state-action spaces using very high-dimensional observations remains a key challenge in developing fully autonomous systems. In this work, we consider one instance of this challenge, the pixels to torques problem, where an agent must learn a closed-loop control policy from pixel information only. To solve this problem we describe high-dimensional time series using a low-dimensional dynamical model. In this work we mix techniques from machine learning (reinforcement learning and deep neural networks) together with standard tools from control (system identification and model predictive control).
This work was launched during my pre-doc at Imperial College February-May 2014, where I collaborated with Marc Deisenroth.
Extended target Tracking using Gaussian Processes
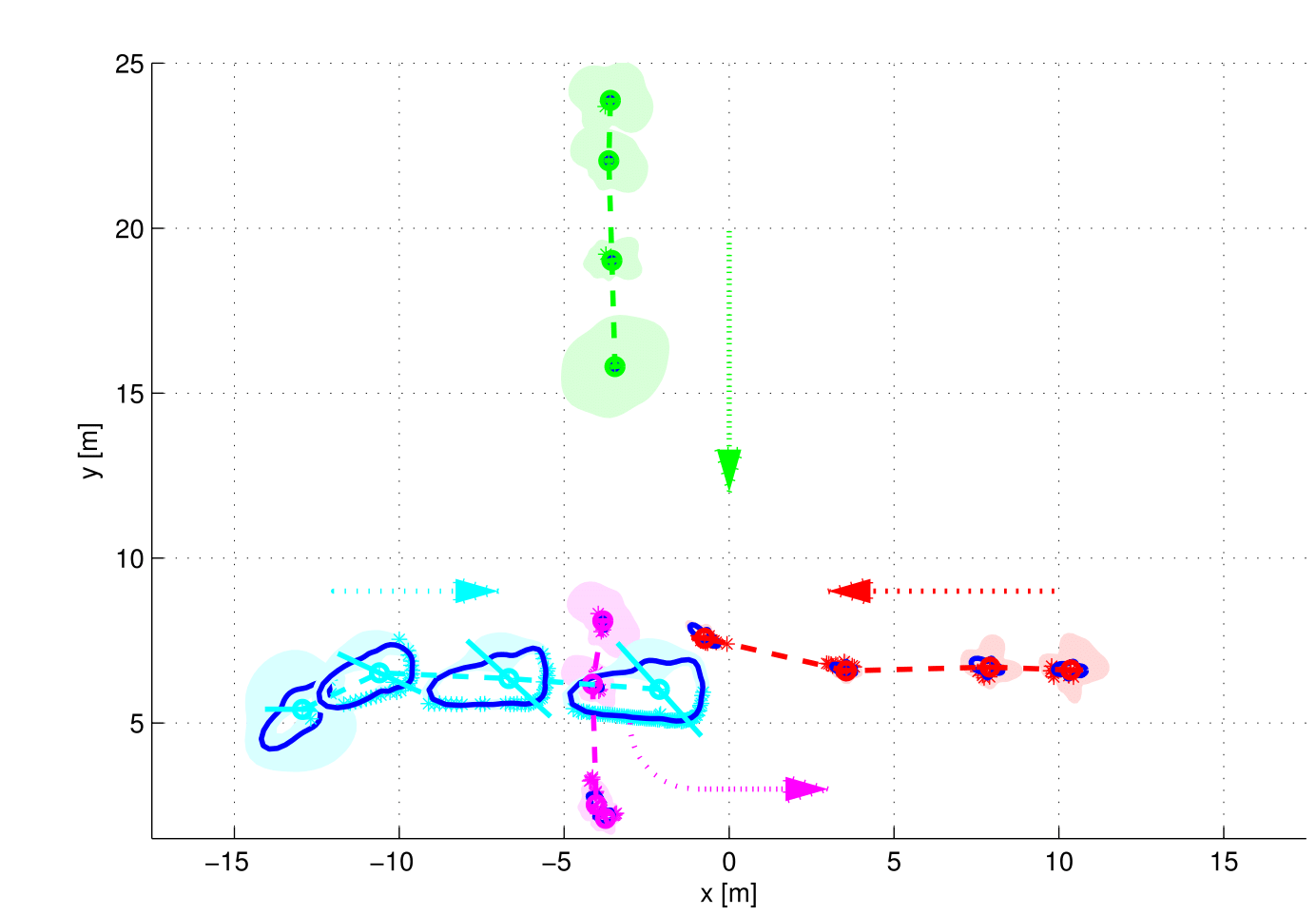
In this work, we investigate models for tracking extended objects or groups of objects that generates multiple measurements at each scan. We aim at finding algorithms and models where the shape and the kinematics of the object are simultaneously estimated and are capable of tracking different objects with different shapes within the same surveillance region. To accomplish this task we investigate the use Gaussian Processes, which is a common model component in machine learning.
This path of work has been conducted together with Emre ?kan.
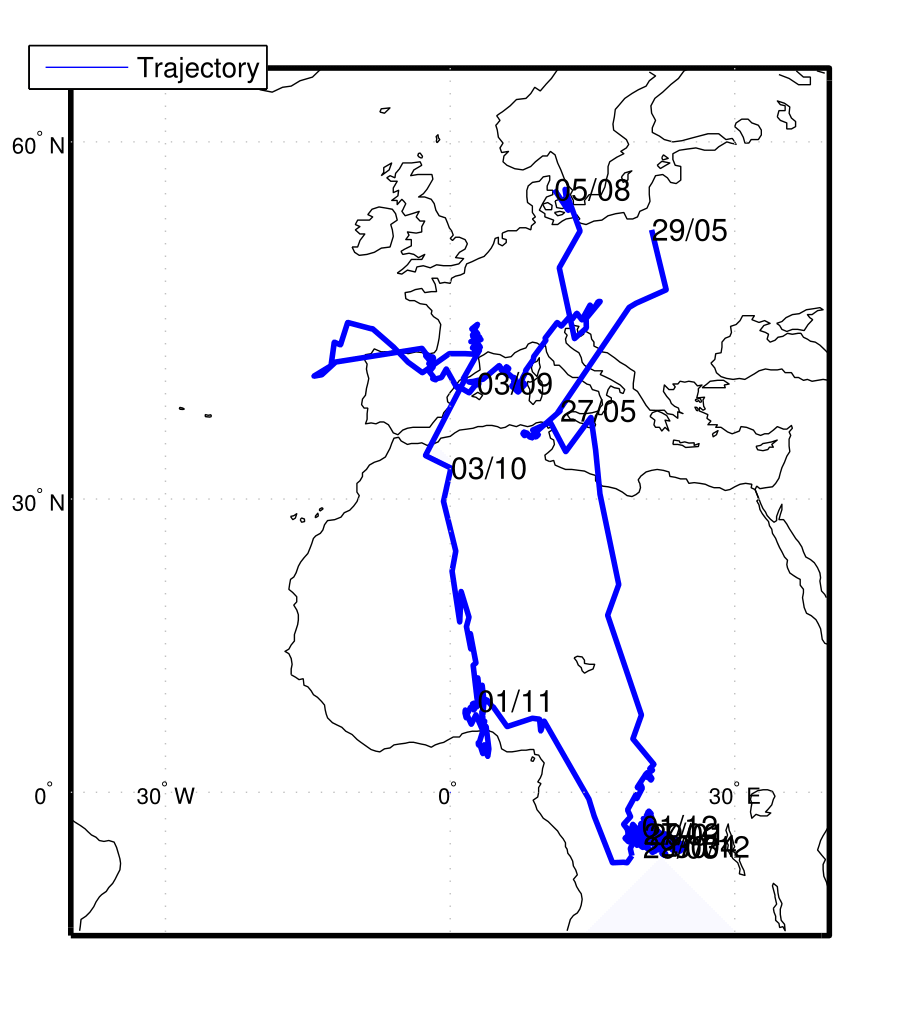
Localization of migrating birds using light loggers
Localization of migrating birds is important for evaluating theories about their migration strategies, the genetics and the evolution behind these strategies. For smaller birds, the weight of the localization equipment attached to the bird is crucial. As a rule of thumb, the sensor can weigh at most 5% of a bird's weight. Therefore, the use of light sensors that detect the time of sunrise and sunset is an attractive localization technique. This provides absolute position of small birds that other techniques cannot accomplish with these weight requirements.
In this work, the estimation of the birds' migration paths' has been formulated as a nonlinear filtering problem where the position is updated at each sunrise and sunset. The study is performed in collaboration with biologists from Lund University at the centre CAnMove, who also have provided the real data presented in the work.
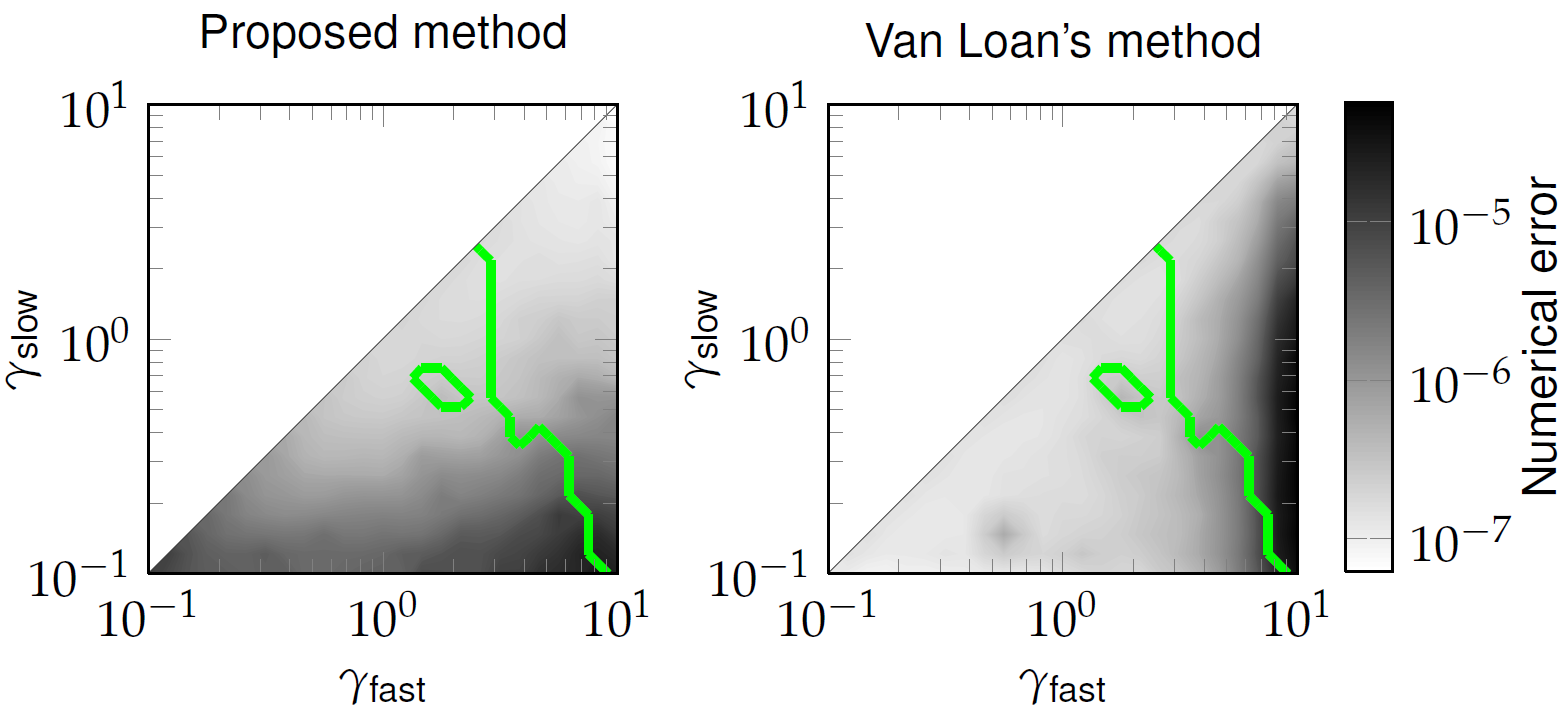
Discretizing stochastic dynamical systems using Lyapunov equations
Stochastic dynamical systems are fundamental in state estimation, system identification and control. System models are often provided in continuous time, while a major part of the applied theory is developed for discrete-time systems. Discretization of continuous-time models is hence fundamental.
In this work we investigate an algorithm using a combination of Lyapunov equations and analytic solutions, enabling efficient implementation in software. The proposed method circumvents numerical problems exhibited by standard algorithms in the literature.
Teaching
During my PhD I have been teaching basic control courses as weel as advanced courses in Sensor fusion and Optimal control
PhD student in Automatic Control
- E-mail:
- niklas.wahlstrom (at) liu.se
Page responsible: Niklas Wahlström
Last updated: 2017-03-27
