 LiU startsida
LiU startsida
Niclas Evestedt: Projects
In progress
RCV course
 As part of an advanced course we are a group of several PhD students that are implementing algorithms to equip KTHs Research Concept Vehicle with autonomous capabilities. My part is development of on-road planning algorithms and integration of motion planners for unstructured areas.
As part of an advanced course we are a group of several PhD students that are implementing algorithms to equip KTHs Research Concept Vehicle with autonomous capabilities. My part is development of on-road planning algorithms and integration of motion planners for unstructured areas.

Intersection merging in heavy traffic
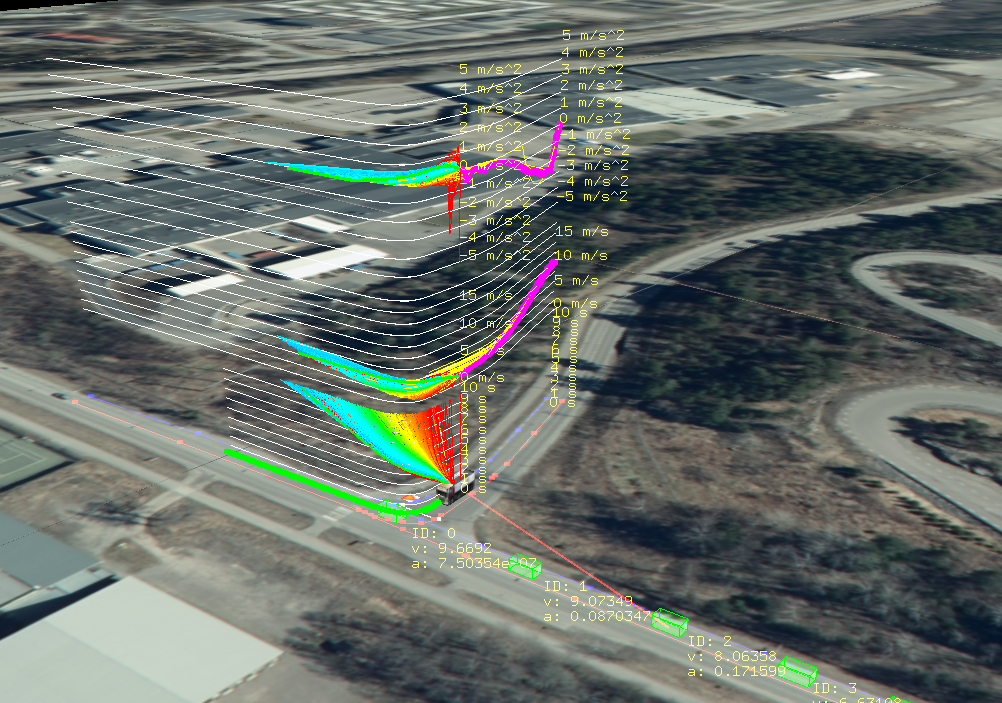 As part of my research we are currently looking at algorithms to perform merging in heavy traffic at an intersection. Current methods often use constant speed or constant acceleration models for other traffic participants but for heavy duty vehicles this is not suitable as the time gap is often not enough when considering the size and acceleration constraints of trucks and interference with other traffic participants is unavoidable. We have investigated the use of smarter models and advanced simulation methods and developed a framework capable of accounting for predictions of others actions depending on our actions.
As part of my research we are currently looking at algorithms to perform merging in heavy traffic at an intersection. Current methods often use constant speed or constant acceleration models for other traffic participants but for heavy duty vehicles this is not suitable as the time gap is often not enough when considering the size and acceleration constraints of trucks and interference with other traffic participants is unavoidable. We have investigated the use of smarter models and advanced simulation methods and developed a framework capable of accounting for predictions of others actions depending on our actions.
iQMatic
iQMatic is a project in collaboration between Linköping University, KTH, Autoliv, Saab and Scania AB with the aim of developing fully autonomous heavy vehicles for mining and other industrial applications. My part in this project have been to develop motion planning algorithms and integrate them for various demonstrations on our full size test vehicle.Real-Time Motion planning with CL-RRT
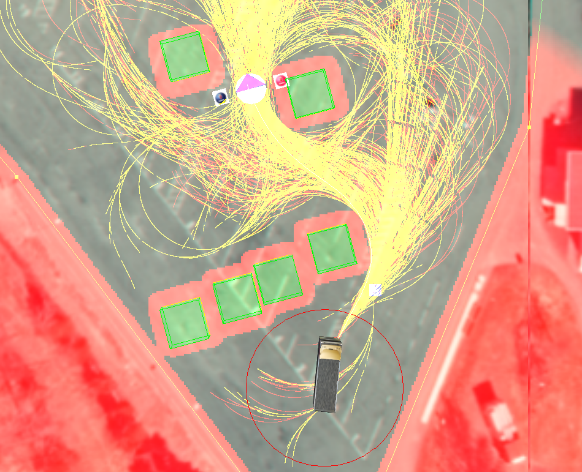 For motion planning in unstructured environments I have developed a real-time motion planning algorithm using Rapidly Exploring Random Trees (RRT) capable of dynamic replanning on a constantly changing environment map. Once a new map is received affected part of the tree can be removed while keeping interesting branches from previous cycles. The algorithm has been used during demonstrations and has operated continuously during several hours.
For motion planning in unstructured environments I have developed a real-time motion planning algorithm using Rapidly Exploring Random Trees (RRT) capable of dynamic replanning on a constantly changing environment map. Once a new map is received affected part of the tree can be removed while keeping interesting branches from previous cycles. The algorithm has been used during demonstrations and has operated continuously during several hours.
Motion planning and control for a truck with doly steered trailer
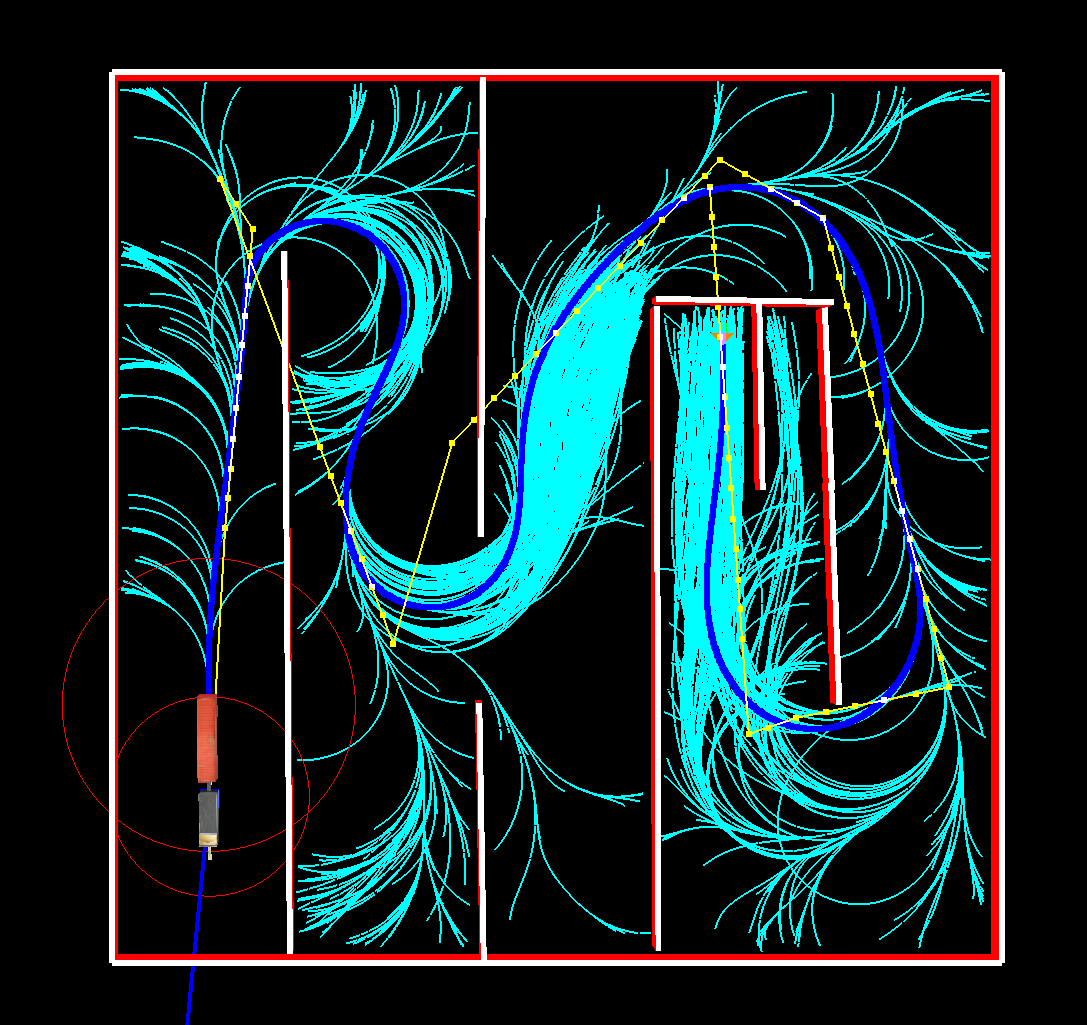 In this work we have developed a motion planning and control framework that can be used to automatically plan and execute complicated manoeuvres for a truck with a dolly steered trailer. The algorithm has been tested on a small scale test platform with promising results and a full scale demonstrator is being developed. A gain scheduled LQ-controller is used for stabilisation and two different strategies for motion planning can be used. The first is manual where a user can define a path to follow from an easy to use interface and the second is a RRT motion planner that can be used to automatically plan complicated paths.
In this work we have developed a motion planning and control framework that can be used to automatically plan and execute complicated manoeuvres for a truck with a dolly steered trailer. The algorithm has been tested on a small scale test platform with promising results and a full scale demonstrator is being developed. A gain scheduled LQ-controller is used for stabilisation and two different strategies for motion planning can be used. The first is manual where a user can define a path to follow from an easy to use interface and the second is a RRT motion planner that can be used to automatically plan complicated paths.
Master's thesis
 My thesis was done as a part of the Autonomous machine project at Volvo Construction Equipment in Eskilstuna, Sweden. The goal was to develop a high level control structure capable of performing one complete load and haul cycle at one of NCCs asphalt plants. As a end result we achieved basic autonomous operation on a simulated environment on Volvos testing area.
My thesis was done as a part of the Autonomous machine project at Volvo Construction Equipment in Eskilstuna, Sweden. The goal was to develop a high level control structure capable of performing one complete load and haul cycle at one of NCCs asphalt plants. As a end result we achieved basic autonomous operation on a simulated environment on Volvos testing area.
Other projects
Platooning
In autumn 2012 we did a fast development for a prototype platooning system that were driven together with systems from two other swedish universities. I developed and Extended Kalman Filter (EKF) for estimating ego position using fused data from several sources, a Kalman filter for estimating distance to the vehicle infront and implemented a simple control structure to maintain distance to the vehicle infront.

Ny Teknik technical gingerbread competition :)
Me and two friends are proud to be runner ups in the 2015 technical ginger bread competition with our ginger bread Volvo excavator. All parts are edible!


PhD Student
(Swedish: Doktorand)
- Phone:
- +46 70 312 75 74
- Mobile (private):
- +46 70 312 75 74
- E-mail:
- niclas.evestedt@liu.se
- Address:
- Dept. of Electrical Engineering
- Linköping University
- SE-581 83 Linköping
- Sweden
- Visiting Address:
- Campus Valla
- Building B
- Room 2A:519
Page responsible: Niclas Evestedt
Last updated: 2016-07-11
